激光测水雷达
2024-04-19
传统的水下目标探测,常常使用声呐,该技术利用声波在水中的传播和反射特性,通过声电转换对水下信息做处理的技术。近年来,激光测水雷达系统也逐渐浮现。这是一种利用激光技术作水体深度和水下地形的技术,在水文学、海洋学、地质学、河流和湖泊管理,以及水下勘探等领域,都有着广泛应用以获取水下地形的精确数据。
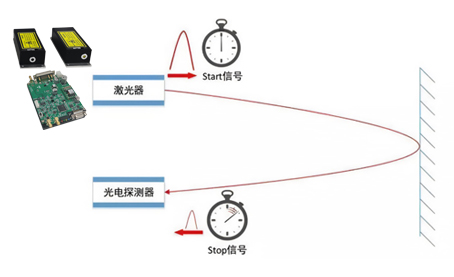
激光测水雷达,主要应用了脉冲激光飞行时间测量(TOF)的方法。具体原理如下:
① 激光雷达通过发射激光束(通常是红外激光),向水体表面发射短脉冲。
② 激光脉冲穿过水体,传播到水底。在水下传播的过程中,激光脉冲可能会被水分子吸收、散射和反射。
③ 当激光脉冲达到水底并被反射回来时,系统记录脉冲的返回时间。
④ 通过测量激光脉冲的往返时间,系统可以计算出水体的深度。这个深度数据可以形成水下地形的模型。
不同激光波长,水的吸收也会不一样。总的而言,水对红外波段的吸收会较小。使用红外激光器,水下传播时能量损失小,更能够穿透水体,直通探测目标并返回信号。
杏林睿光自主研发的MCA-R系列微片激光器,采用半导体泵浦被动调Q技术,全密封设计,脉宽可达亚纳秒,峰值功率高。产品波长有1064nm和532nm两种可选,配备小型化电路板,支持内/外触发两种工作模式,极简的体积便于集成,满足您的设计需求。

免责声明:本文部分内容来自网络,以技术研究交流为目的,仅供大家参考、学习,如描述有误或者学术不对之处欢迎及时提出。如涉及版权问题,请联系我们将尽快核实并删除。




